ปัจจุบัน เครื่องจักรกล (Machine) และ เทคโนโลยีระบบอัตโนมัติ (Automation Technology) เข้ามามีบทบาทสำคัญในวงการอุตสาหกรรมโลกจำนวนมาก เพื่อเพิ่มกำลัง และคุณภาพในการผลิตสินค้าต่างๆ จำนวนมหาศาล และหลากหลายประเภทมาเพื่อตอบสนองความต้องการของมนุษย์ โดยเฉพาะเครื่องจักรกลประเภทหุ่นยนต์ (Robot) ที่เข้ามาทำงานอันตรายแทนที่มนุษย์ เพื่อเพิ่มความปลอดภัยให้กับบุคลากร เพิ่มประสิทธิภาพ และคุณภาพในไลน์ผลิตต่างๆ ให้มากยิ่งขึ้น โดยหุ่นยนต์ที่นิยมนำมาใช้ในวงการอุตสาหกรรมจะมีลักษณะเหมือนส่วนแขนของมนุษย์ หรือที่เรียกกันว่า “แขนกล” (Robotic Arms)
ประเภทของเทคโนโลยีหุ่นยนต์ แบ่งได้กี่ประเภท อะไรบ้าง
หลักๆ แล้วหุ่นยนต์อุตสาหกรรมจะแบ่งประเภทตามลักษณะรูปทรงของพื้นที่ทำงาน (Envelope Geometric) สามารถแบ่งออกเป็นประเภทใหญ่ๆ ด้วยกัน 6 ประเภท ดังนี้
1. Cartesian Robots (Linear Robots)
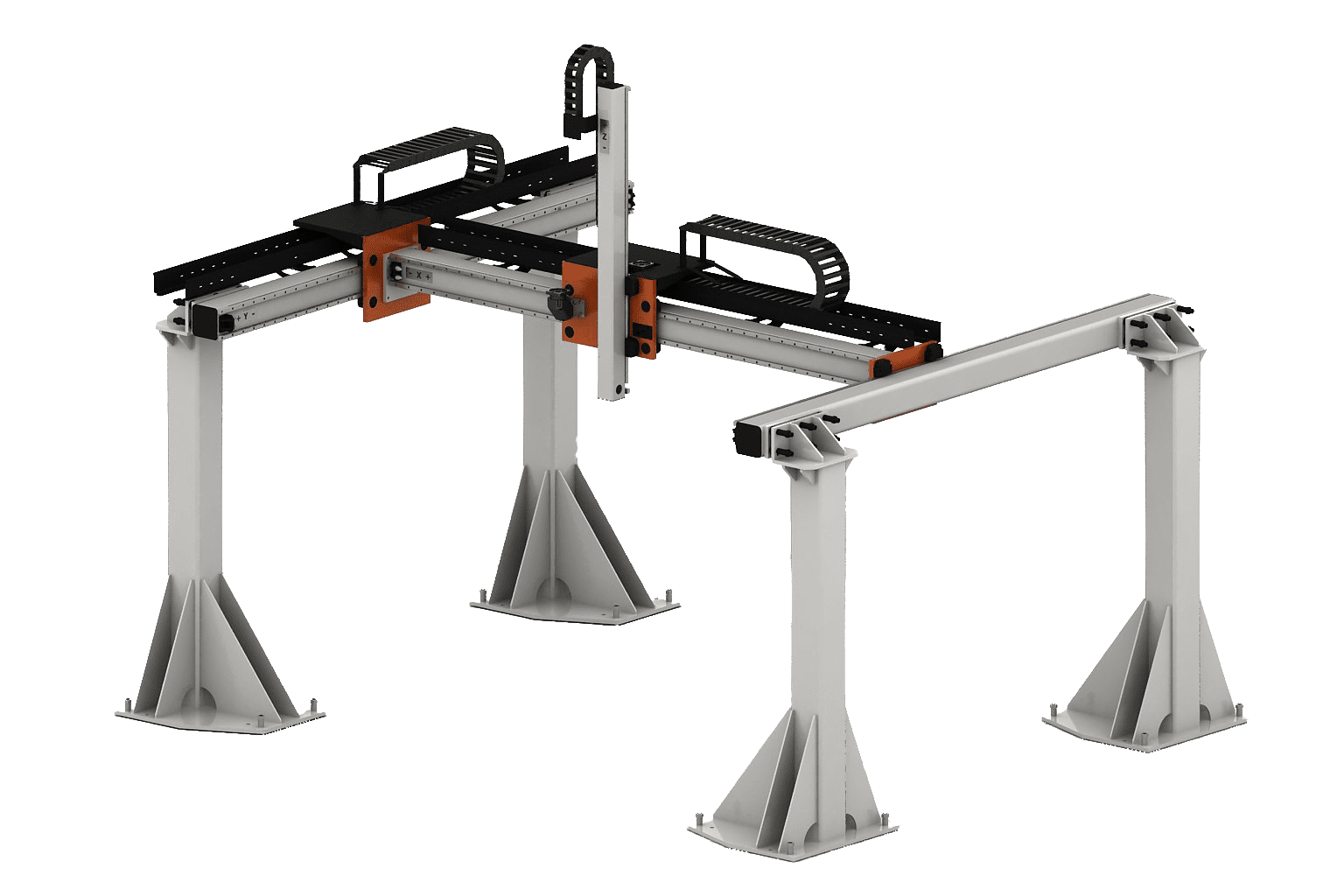
Cartesian Robot คือ หุ่นยนต์อุตสาหกรรมแบบแกน (Linear) ที่มีความแข็งแรง และมีประสิทธิภาพในการรับน้ำหนักได้มากที่สุด สามารถเรียกอีกแบบได้ว่า Rectangular Robots
ในส่วนของการทำงานของ Cartesian Robot หากโครงสร้างมีลักษณะคล้ายปั้นจั่นเหนือศีรษะ (Overhead Crane) จะเรียกว่าเป็นหุ่นยนต์ชนิด Gantry แต่ถ้าหุ่นยนต์ไม่มีขาตั้งหรือขาเป็นแบบอื่น เรียกว่า Cartesian โดยหุ่นยนต์ประเภทนี้เน้นการเคลื่อนที่เป็นแนวเส้นตรง 3 มิติ (Prismatic) เลื่อนเข้า เลื่อนออก เหมาะกับงานขนย้าย (Pick-and-Place) หรือหยิบจับในการประกอบสินค้า เช่นบรรจุชิ้นงานเข้าเครื่องจักร (Machine Loading), จัดเก็บชิ้นงาน (Stacking) และยังสามารถประกอบชิ้นงานที่ไม่ซับซ้อน และไม่หมุนอย่าง อุปกรณ์อิเล็กทรอนิกส์บางประเภท เป็นต้น
ข้อดี
-
มีการเคลื่อนที่เป็นแนวเส้นตรงทั้ง 3 มิติ
-
สามารถทำความเข้าใจการเคลื่อนที่ได้ง่าย
-
มีส่วนประกอบ และโครงสร้างที่ง่ายต่อการประกอบ
-
โครงสร้างแข็งแรง สมดุลตลอดการเคลื่อนที่
ข้อเสีย
-
ต้องการพื้นที่ติดตั้งจำนวนมาก
-
บริเวณที่หุ่นยนต์เข้าไปทำงานได้ จะเล็กกว่าขนาดของตัวหุ่นยนต์
-
ไม่สามารถเข้าถึงวัตถุจากทิศทางข้างใต้ได้
-
การ Sealing เพื่อป้องกันฝุ่นและของเหลวทำได้ยาก
-
การ ไม่สามารถทำงานละเอียดอ่อนได้
2. Cylindrical Robots
Cylindrical Robot คือ หุ่นยนต์อุตสาหกรรมทรงกระบอก (Cylindrical) มีลักษณะการเคลื่อนไหวแบบหมุนรอบแกน
มีแท่งใช้ในการยกจับ ส่วนประกอบไม่ซับซ้อน ควบคุมได้ง่าย เหมาะสำหรับงานเชื่อม หรืองานประกอบที่ไม่ซับซ้อน การยกสิ่งของที่ไม่หนักมาก สามารถเข้าออกโพรงเล็กๆ ได้มีประสิทธิภาพมากกว่าตัวอื่นๆ มีลักษณะคล้ายกับ Cartesian Robot แต่สามารถทำงานละเอียดอ่อนได้มากกว่า รับน้ำหนักได้เบากว่า
ข้อดี;
-
มีส่วนประกอบไม่ซับซ้อน
-
สามารถทำความเข้าใจการเคลื่อนที่ได้ง่าย
-
สามารถเข้าถึงเครื่องจักรในบริเวณที่เป็นช่องหรือโพรง หรือ ที่มีการเปิด – ปิด ได้ง่าย
ข้อเสีย
-
มีพื้นที่ทำงาน (Work Envelope) ค่อนข้างจำกัด
-
การ Sealing เพื่อป้องกันฝุ่นและของเหลวทำได้ยาก
3. Spherical Robots (Polar Robots)

เป็นหุ่นยนต์อุตสาหกรรมแบบขั้ว (Polar) หรือแบบทรงกลม (Spherical) ที่มีการเคลื่อนที่แนวเส้นตรง มีแกนหมุน 3 แกน ได้แก่ เอว ไหล่ และข้อศอก มีพื้นที่การทำงาน (Work Envelop) เป็นรูปทรงกลมเหมาะสำหรับการหยิบจับชิ้นงาน และงานเชื่อมในรูปแบบต่างๆ ที่ซับซ้อนขึ้นจากตัว หุ่นยนต์อุตสาหกรรมทรงกระบอก (Cylindrical Robot)
ข้อดี;
-
สามารถทำงานได้หลากหลายมากขึ้นเนื่องจากการหมุนของแกนที่ 2 (ไหล่)
-
สามารถที่จะก้มลงมาจับชิ้นงานบนพื้นได้สะดวก
ข้อเสีย
-
มีระบบพิกัด (Coordinate) และส่วนประกอบ ที่ซับซ้อน
-
การเคลื่อนที่และตัวระบบควบคุมมีความซับซ้อน เข้าใจได้ยาก
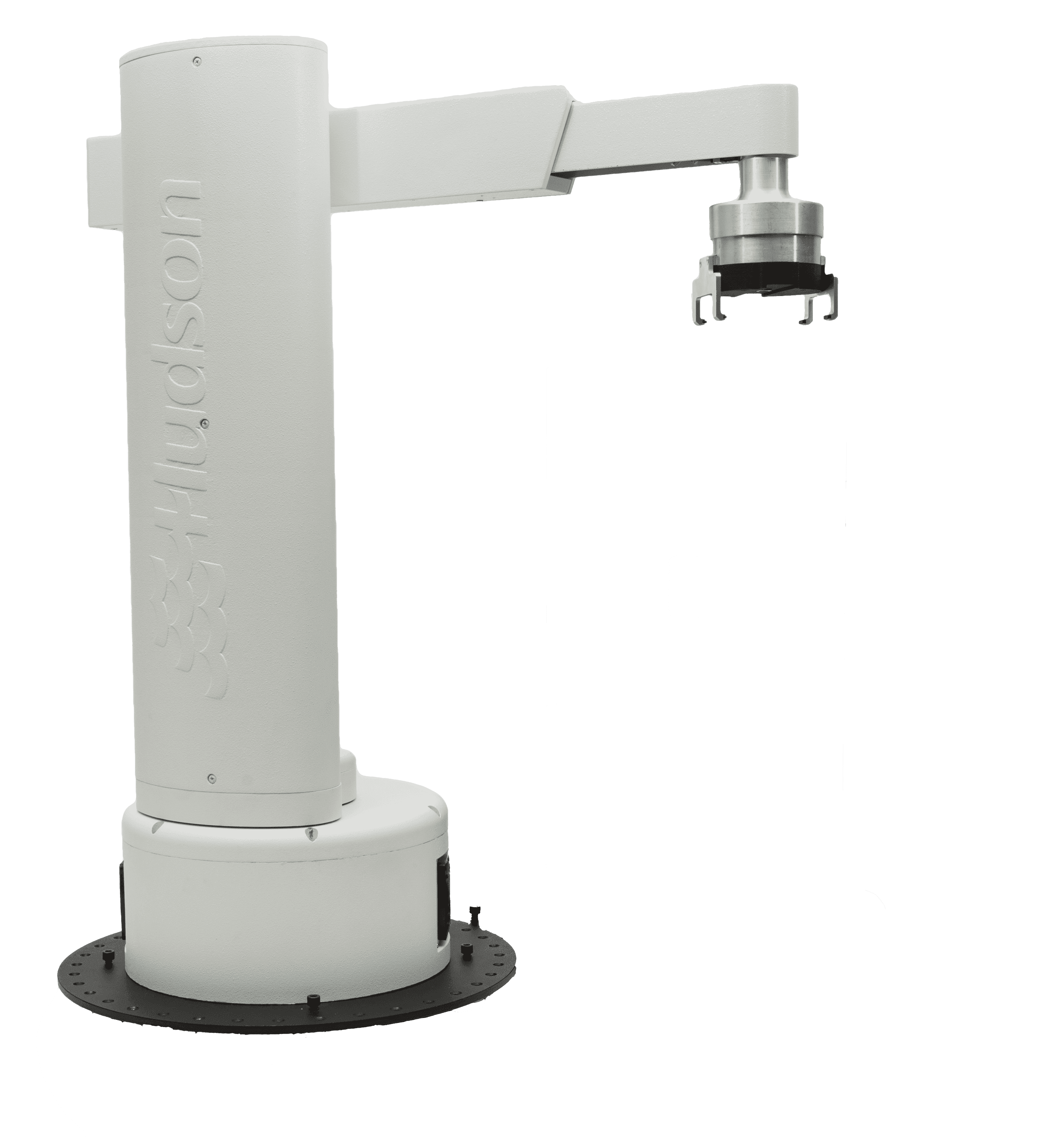
4. SCARA Robots
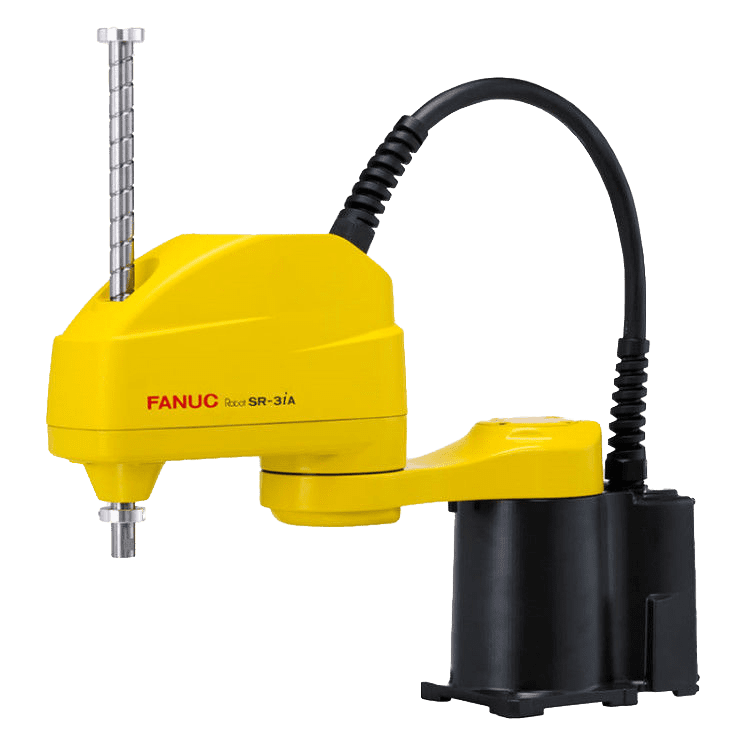
SCARA Robot คือ หุ่นยนต์อุตสาหกรรมอีกหนึ่งชนิด คำว่า SCARA ย่อมาจาก Selective Compliance Assembly Robot Arm (SCARA) เป็นหุ่นยนต์อุตสาหกรรมที่มี 2 จุดหมุนสามารถเคลื่อนที่ได้รวดเร็วในแนวระนาบ และมีความแม่นยำสูงมาก เหมาะสำหรับงานบรรจุผลิตภัณฑ์ชิ้นเล็ก (Packaging) ที่มีน้ำหนักไม่มาก และงานตรวจสอบ (Inspection) แต่จะไม่เหมาะกับงานประกอบชิ้นส่วนทางกล (Mechanical Part)
ข้อดี;
-
สามารถเคลื่อนที่ในแนวระนาบ และขึ้นลงได้รวดเร็วคล่องแคล่ว
-
มีความแม่นยำสูงมาก
-
เหมาะสำหรับการทำงานที่ต้องการความละเอียด
ข้อเสีย
-
มีพื้นที่ทำงาน (Work Envelope) ค่อนข้างจำกัด
-
ไม่สามารถหมุน ในลักษณะมุมต่างๆ ได้เนื่องจากมีจุดหมุนแค่ 2 จุด
-
สามารถยกน้ำหนักได้ไม่มากนักเมื่อเทียบกับตัวอื่นๆ
5. Articulated Robot (Jointed Arm)
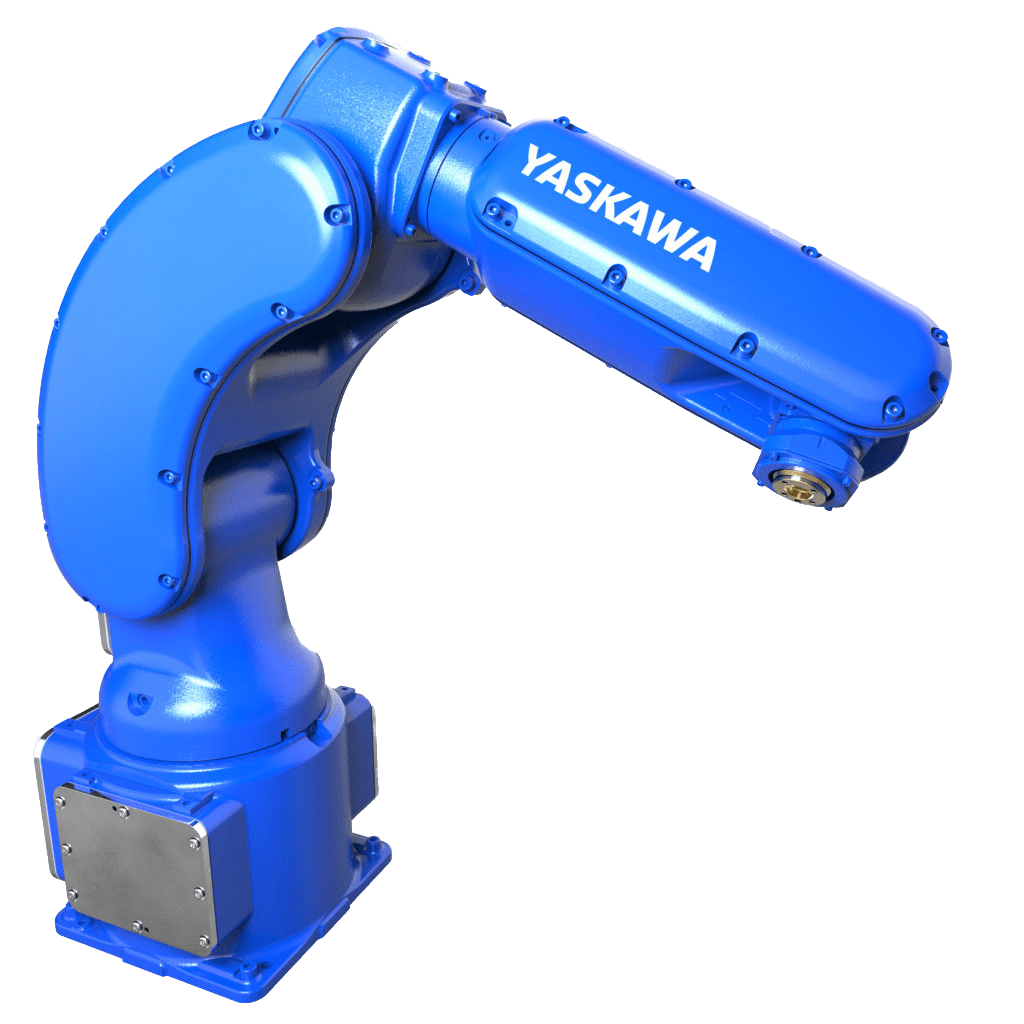
เป็นหุ่นยนต์อุตสาหกรรมแบบข้อต่อ (Jointed Arm) ที่ทุกแกนการเคลื่อนที่เป็นแบบหมุน (Revolute) มีลักษณะการเคลื่อนไหวเหมือนแขนของมนุษย์
แกนแต่ละจุดประกอบไปด้วยช่วงเอว ท่อนแขนบน ท่อนแขนล่าง ข้อมือ ซึ่งถือว่าเป็นหุ่นยนต์อุตสาหกรรมที่มีประสิทธิภาพในการใช้งานมากที่สุด เพราะสามารถเข้าถึงตำแหน่งต่างๆ ได้ดี เช่น งานเชื่อม, งานยกของ, งานตัด, งานที่มีการเคลื่อนที่ยากๆ เช่น งานพ่นสี งาน Sealing และอื่นๆ อีกมากมาย
ข้อดี;
-
มีความยืดหยุ่นสูงในการเข้าถึงจุดต่างๆ ที่หุ่นยนต์ตัวอื่นไปไม่ถึง
-
บริเวณแกนสามารถ Seal เพื่อป้องกันฝุ่น ความชื้น หรือน้ำ ได้ง่ายกว่าตัวอื่น
-
มีพื้นที่การทำงาน (Work Envelope) ที่มากกว่าตัวอื่น
-
สามารถเข้าถึงชิ้นงานได้จากด้านบน ด้านล่าง
-
เหมาะกับการใช้มอเตอร์ไฟฟ้า เป็นชุดขับเคลื่อน
ข้อเสีย
-
มีระบบพิกัด (Coordinate) ที่ซับซ้อน
-
การเคลื่อนที่และระบบควบคุมทำความ เข้าใจได้ยากมาก
-
ควบคุมให้เคลื่อนที่ในแนวเส้นตรง (Linear) ได้ยาก เนื่องจากความซับซ้อน ต้องมีผู้เชี่ยวชาญ หรือมีการวางระบบการใช้งานที่ดีอยู่แล้ว เพื่อให้การควบคุม Articulated Robot เป็นไปได้อย่างราบรื่น
-
โครงสร้างไม่มั่นคงตลอดช่วงการเคลื่อนที่ เพราะบริเวณปลายแขนจะมีการสั่น ทำให้ความแม่นยำลดลง
6. Delta Robots (Parallel Robots)
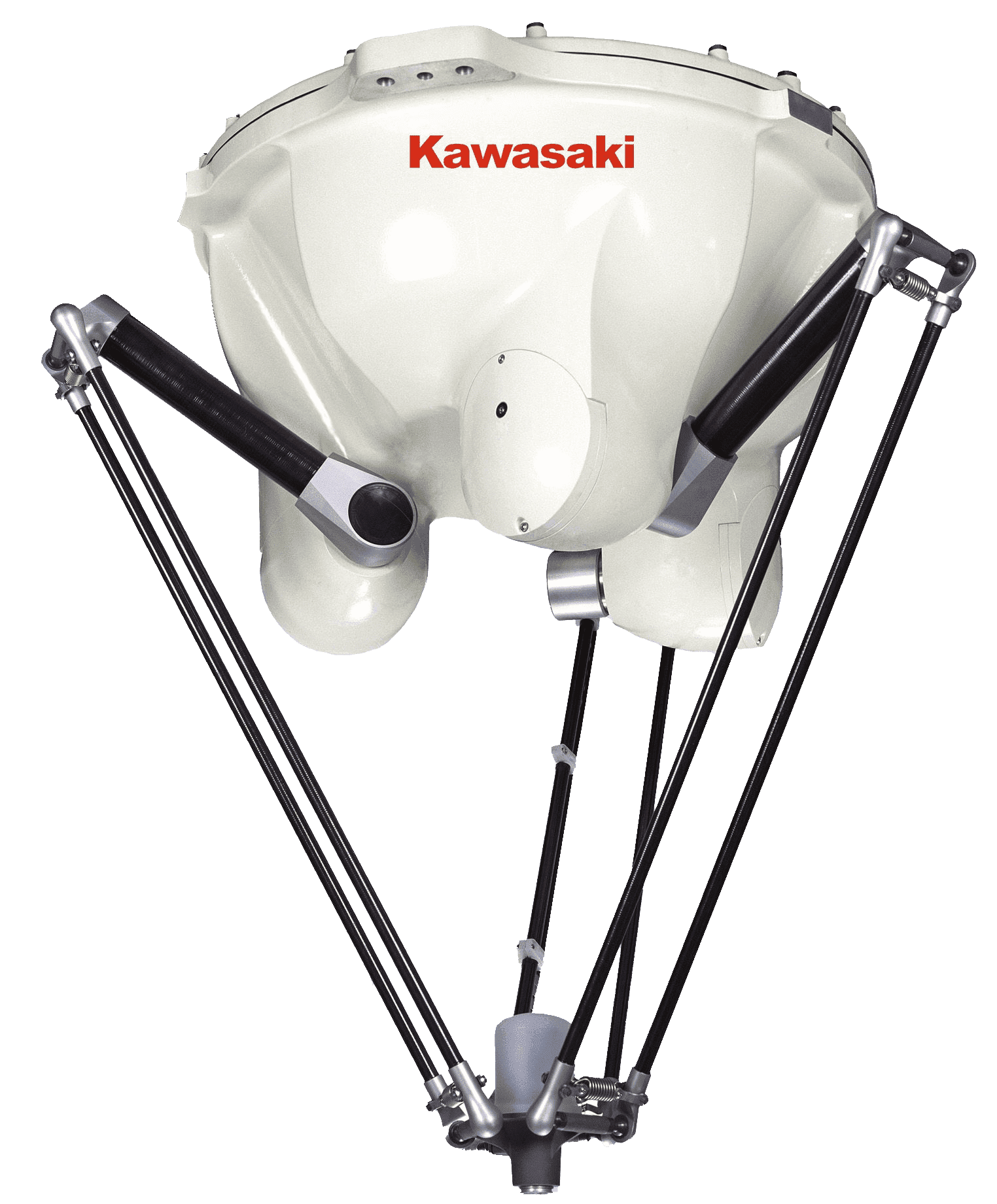
Delta Robot สามารถเรียกอีกชื่อได้ว่า Parallel Robot หรือ Spider Robot เป็นหุ่นยนต์อุตสาหกรรมในรูปร่างคล้านแมงมุม หรือแบบสี่เหลี่ยมด้านขนาน (Parallelograms) โดยมีตั้งแต่ 2 แกน ถึง 5 แกน
โดยมากแล้วหุ่นยนต์อุตสาหกรรมประเภทนี้จะติดตั้งไว้ด้านบนของงานที่ต้องผลิต ติดตั้งไว้กับโครงค้ำ ตัวมอเตอร์ของหุ่นยนต์ประเภทนี้จะอยู่ตรงฐาน ทำให้ส่วนอื่นๆ ค่อนข้างจะมีน้ำหนักเบา ทำให้เคลื่อนไหวได้ค่อนข้างเร็ว ถือว่าเป็นหุ่นยนต์อุตสาหกรรมที่เหมาะกับงานประเภทยกชิ้นงานแล้ววาง (Pick & Place) งานบรรจุผลิตภัณฑ์ชิ้นเล็ก (Packaging)
ข้อดี;
-
น้ำหนักเบา เคลื่อนไหวเร็วที่สุดในบรรดาหุ่นยนต์อุตสาหกรรมที่กล่าวถึงในบทความนี้
-
มีความแม่นยำสูง
-
เหมาะกับงานประเภทยกชิ้นงานแล้ววาง (Pick & Place)
ข้อเสีย
-
ไม่เหมาะกับการยกสินค้าหรือชิ้นงานที่มีน้ำหนักมาก
-
ระยะของการขยับของแขนหุ่นยนต์ค่อนข้างจำกัด
สรุป
หุ่นยนต์อุตสาหกรรมทุกประเภทต่างมีข้อดีและข้อเสียต่างกันไป ขึ้นอยู่กับการใช้งาน ไม่ว่าจะเป็นหุ่นยนต์สำหรับขนของ ไปจนถึงทำงานฝีมือจุดเล็กๆ ดังนั้น ผู้ผลิตควรเลือกใช้หุ่นยนต์อุตสาหกรรมให้เหมาะกับไลน์ผลิต และมีบุคลากรที่มีความรู้ความเข้าใจในการใช้งาน เพื่อประสิทธิภาพที่สูงที่สุด และความปลอดภัยในการทำงาน
ถึงแม้ว่าทั่วโลกเริ่มให้การยอมรับ และใช้งานเครื่องจักรกล หรือหุ่นยนต์ ในไลน์อุตสาหกรรมทั่วโลก แต่ยังมีปัญหาในเรื่องของต้นทุนที่ค่อนข้างสูง รวมถึงการต้องมีผู้เชี่ยวชาญคอยควบคุมและดูแลตลอดการใช้งานอยู่ดี อย่างไรก็ตามหุ่นยนต์อุตสาหกรรมก็นับว่ามีบทบาทสำคัญและเป็นบทบาทหลัก ในการสรรสร้าง และผลิตสิ่งต่างๆ ในโลกยุคปัจจุบันอย่างหลีกเลี่ยงไม่ได้
สำหรับผู้ที่สนใจด้านระบบอัตโนมัติ (Factory Automation) การควบคุมและโปรแกรมหุ่นยนต์ Robotec เป็นผู้นำการบูรณาการโซลูชันหุ่นยนต์ (Robotic Integration & Automation Solutions) เข้ากับกระบวนการผลิตได้กลายเป็นบรรทัดฐานมาเป็นเวลานานในหลายอุตสาหกรรมทั่วโลก ติดต่อทีมงาน Robotec เรามีผู้เชี่ยวชาญด้านเทคนิคและเครื่องมือที่พร้อมให้บริการคุณอย่างเต็มที่



